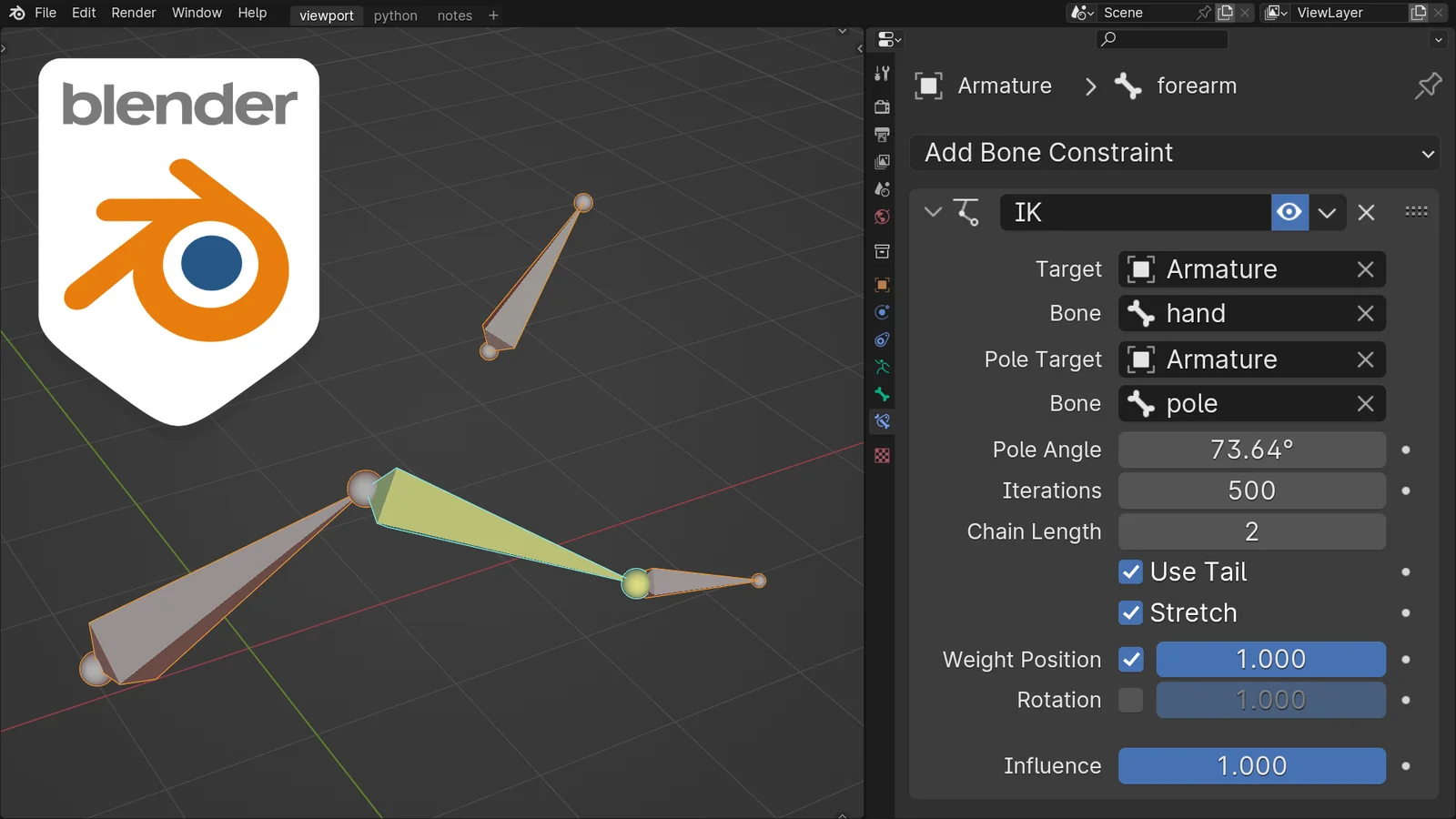
This tool calculates and sets the exact pole angle for inverse kinematic constraints on three-bone IK chains. Users select the pose bone containing the IK constraint and run the operator from the search menu. It accurately calculates the angle so the armature will not shift or rotate when toggling the IK constraint on and off in the rest position.
The calculation requires the active pose bone to be connected to a parent and have a defined Pole Sub-Target. It is specifically designed for three-bone chains and calculates the angle independently of the base bone's parent hierarchy.
You might also like
5.0 Tutorial·Free

Addon·$5

Addon·CA$2.50
Addon·$20
Addon·$15
5.0 Addon·$17
Addon·$18
4.7 Addon·Free
Addon·Free
4.9 Addon·Free